配置途径
机器人控制系统 (KRC)的硬盘映射既可建立到一个网络驱动器里,也可通过一个网络驱动器来恢复。
文件夹 NET 内有两个 INI- 文件可供配置使用:
1 NetCon.INI:
在该文件里可设置需采用的网络路径。
a.UNC 网络路径
3 SetIPAddress.INI:
在该文件里可设置需采用的 IP 地址。
a.IP 地址
b. 子网掩码
c. 网关 (备选)
第一、第二分区的大小可通过库卡 USB 启动盘内的配置文件Mode\Controller.INI 来调整。 第一、第二分区的容量大小必须分别至少达到3000?MB,并且两者合计总量最大允许等于硬盘内存的总大小。
分区 1: C 盘:C:\KUKA_DISK
分区 2: D 盘:D:\KUKA_DATA
分区 3: 隐藏分区
隐藏分区包含分区 C:\ 和 D:\ 的主盘映射 (= 库卡系统软件的供货状态)。
修复控制台可检索硬盘内存的总大小。 倘若其中一个分区已获得的分配值太小或者两个分区的分配总值大于硬盘内存总大小,系统将自动分配分区大小:
分区 1: 硬盘内存总大小的二分之一
分区 2: 硬盘内存总大小的四分之一
分区 3: 剩余部分
在配置库卡 USB 启动盘时,可以设定为在建立或恢复机器人
控制系统(KRC)硬盘映射时无需用户操作。
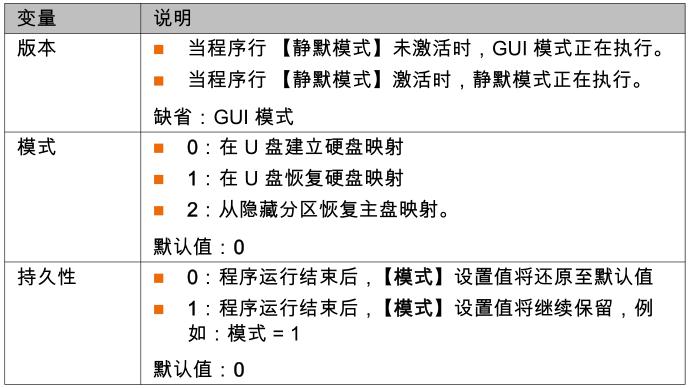
在库卡 USB 启动盘内的配置文件 Mode\Controller.INI 里设置静默模式。
静默模式的应用示例:
1 没有可用的图像型操作界面。
2 在多台型号一致的机器人首次投入使用时,
硬盘映射被多次恢复。
配置NET\NetCon.ini:
通过修复控制台定义的网络设置只适用于当前的 WinPE 会话 (session)。该配置不长期保存。
对于需长期有效的网络设置,必须在 USB-Boot-Stick\Net 的 INI 文件里直接进行配置。如下图:

驱动器标识字母在系统启动过程中由 Win PE 系统自动分配。
Windows 环境下的 UNC 网络路径格式具体如下:
1 \\Servername\Freigabename
配置 NET/SetIPAdress.ini:
在该文件里可设定 IP 地址基准

默认值是 xxx,即 IP 是经由 DHCP 服务器来设置
如果此非所愿,则所有设置必须手工完成
必须注意 IPv4 地址的路由器和子网掩码的默认前缀长度。 这里不进行合理性检验。
USB-Boot-Stick\Net 文件 IpAddress.RTF 里的默认值如下:


配置Mode\Controller.INI:
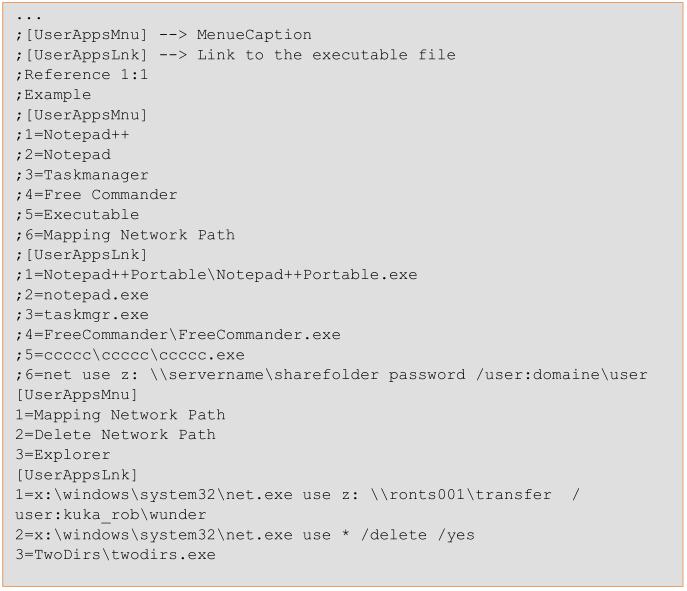
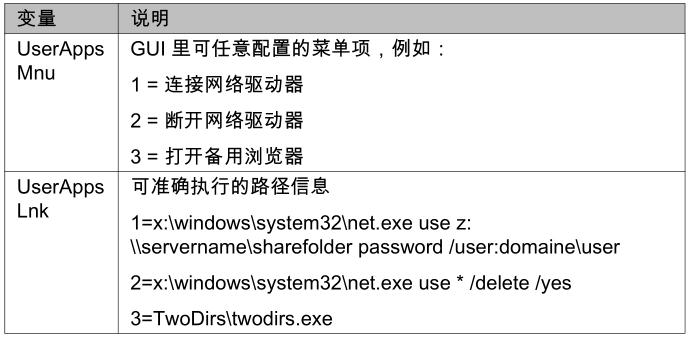
UserApps.INI:
利用该文件可将经常重复的任务固定到一个单独的菜单项中。
该文件可直接在 U 盘的根目录里找到。
【 UserAppsMnu】和 【 UserAppsLnk】里的各行是一致的。
第一半部分属于解释性内容,而第二半部分才真正属于配置。
已经配置完毕的文件在启动 U 盘时也将同时启动。
所有外部程序 (例如:TwoDirs)必须已存在于 U 盘里。